
Select A Project
Cardboard Ferris Wheel Marble RunDriving Finch with Xbox Controller
Lego Spike Position Motor Experiment
Frank Morton is the Executive Director for Neighborhood Makers and is constantly making something.
Level: Tags:
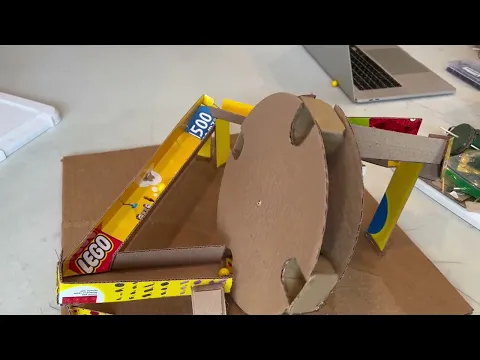
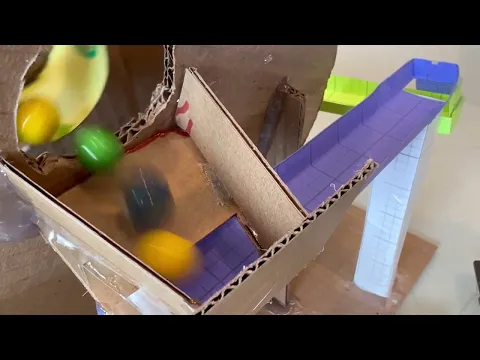
Cardboard Ferris Wheel Marble Run
Make a cardboard ferris wheel based on the Kiwi Company Kit with the motor controlled by a Hummingbird microcontroller. The initial prototype was analog.

import sys
import asyncio
import datetime
import random
from BirdBrain import Hummingbird
from time import sleep
def set_random_tri_color(bird, port):
red = random.randint(25, 80)
green = random.randint(25, 80)
blue = random.randint(25, 80)
bird.setTriLED(port, red, green, blue)
def set_disco_ball(bird, angle):
bird.setPositionServo(2, angle)
set_random_tri_color(bird, 1)
set_random_tri_color(bird, 2)
async def wheel(bird):
while True:
bird.setRotationServo(1, random.choice([10, -25, -30, -35, 0]))
await asyncio.sleep(random.uniform(0, 5))
async def disco_ball(bird):
while True:
if bird.getDistance(1) < 14:
bird.setLED(1, 50)
for i in range(7):
set_disco_ball(bird, 10)
await asyncio.sleep(0.25)
set_disco_ball(bird, 80)
await asyncio.sleep(0.25)
else:
bird.setLED(1, 5)
bird.setTriLED(1, 0, 0, 0)
bird.setTriLED(2, 0, 0, 0)
bird.setPositionServo(2, 45)
await asyncio.sleep(0)
async def runner(bird):
await asyncio.gather(wheel(bird), disco_ball(bird))
bird = Hummingbird("A")
Library.reset_hummingbird(bird, 2)
asyncio.run(runner(bird))
Remote Robot
–
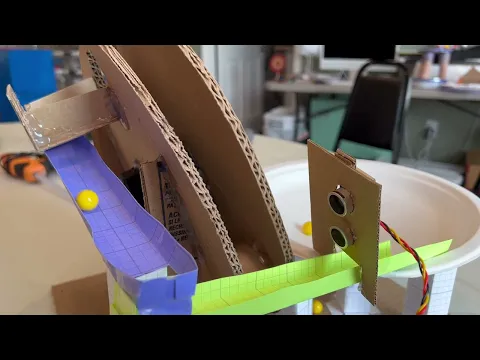
Consider first building an analog version of the marble wheel. Doing so showed the importance of aligning the two cardboard circles as well as centering the spindle of the motor on both circles.
Videos
Images





Videos

Videos
Videos
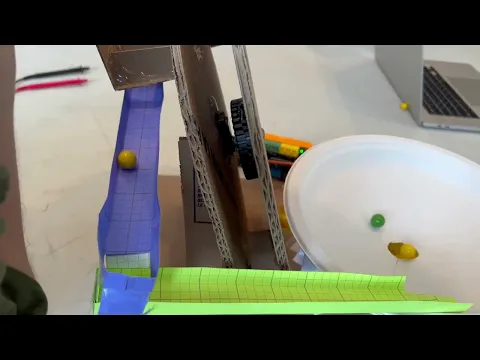
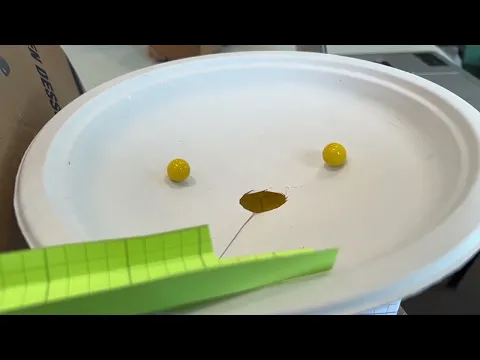
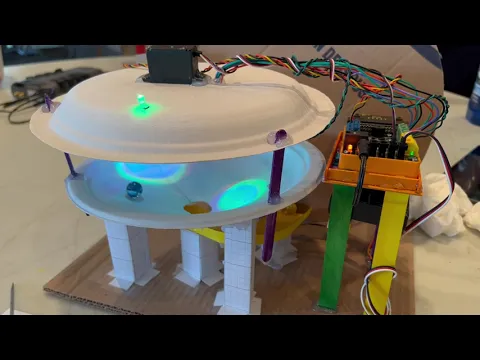
Add an action to the project triggered by the motion sensor. In this case, the motion sensor triggers a "disco room" with two oversized RGB LEDs attached to a position servo. Also, notice the green LED on top indicating the triggering of the sensor.
Also note that because of wire lengths, we added a stand to hold the hummingbird microcontroller closer to their connections.
Don't be surprised if the distance sensor does not always trigger the action. The sensors are not always accurate or responsive enough.
Also note that because of wire lengths, we added a stand to hold the hummingbird microcontroller closer to their connections.
Don't be surprised if the distance sensor does not always trigger the action. The sensors are not always accurate or responsive enough.
Videos

Images

